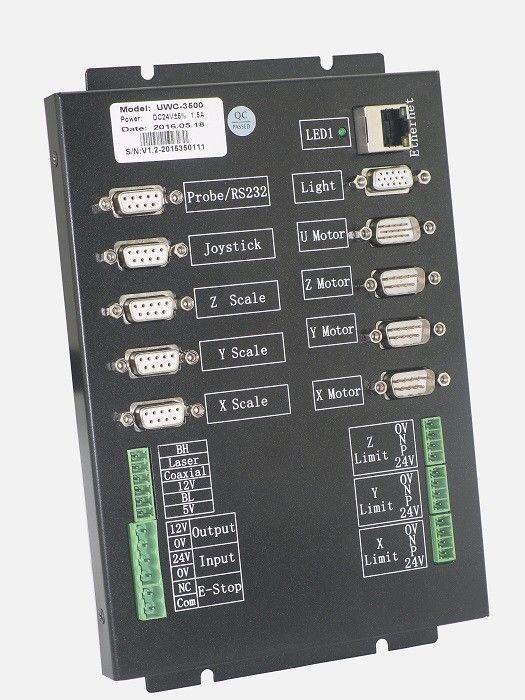
Umum 4 Axis Vision Measurement Machine Controller Smart Package
Pengantar
UWC 3500 adalah pengontrol full-close-loop 4 sumbu umum, yang digunakan dalam mesin pengukuran penglihatan dan mesin pengukuran penglihatan komposit, atau sistem pengukuran otomatisasi.Dengan skala linier atau motor encoder close-loop posisi umpan balik, UWC3500 mampu mencapai akurasi tinggi.
Fitur:
1. Struktur mesin atas dan bawah canggih, CPU kinerja tinggi + FPGA
2. Komunikasi: Antarmuka Ethernet, waktu berjalan untuk fungsi API tunggal kurang dari 0,45ms.
3. Mode kontrol arah + denyut nadi, mampu mengontrol untuk langkah motor, AC servo, servo linier atau DDM, dll
4. Kontrol gerak close-loop penuh, penentuan lokasi presisi tinggi yang cepat, akurat, dan stabil. Algoritma kontrol close-loop canggih dan sangat sedikit parameter PID, memastikan pembalikan mudah bagi pengguna.
5. S jenis kurva kecepatan planing, rasio bagian S dalam proses deceleration dapat diatur.
6Strategi lokasi:
Pulse + arah kontrol open-loop.
Pengendalian lingkaran rapat umpan balik posisi skala/encoder linier, algoritma PID+VFF ditingkatkan, menghilangkan masalah pergeseran nol.
7. Motion mode:
Titik ke titik, mode JOG, mode homing yang mudah digunakan dan fleksibel, interpolasi linier 2 sumbu atau 3 sumbu, interpolasi busur horizontal, probe sentuh, dan mode joystick.
8Kebijakan keamanan:
Fungsi penyesuaian otomatis dari mesin berputar, secara otomatis mengatur batas logika dan arah, parameter motor dan arah umpan balik linier,memastikan untuk menghilangkan kesalahan gerakan umpan balik.
Ketika poros bergerak dekat dengan batas ada decelerasi maju, dan sebelum homing ada pembatasan dipaksa dari kecepatan bergerak.
Perangkat lunak terbatas didukung.
9. Fungsi API menggunakan enkapsulasi yang menghadap objek, yang menawarkan pemrograman yang mudah. Sebagian besar parameter ditetapkan oleh perangkat lunak debug.
10Integrasi tinggi, kinerja tinggi, produksi dan pemeliharaan yang stabil dan mudah.
11UWC-3500 menggunakan teknologi produksi SMT, memastikan stabilitas dan keandalan.
12Dengan fleksibilitas tinggi UWC3500 cocok untuk peralatan non-standar dan juga menyesuaikan fungsi tersedia.
13. UWC3500 mendukung fungsi pembaruan firmware online, pengguna tidak perlu menghapus controller dari mesin, mudah untuk memperbarui dan memperluas fungsi,memperpendek siklus pengembangan dan memutar peralatan.
14Modul eksternal UWC348 IO, maksimal 26 dalam 26 keluar.
15. Posisi membandingkan fungsi pencocokan, yang dapat dicocokkan dengan tepat, juga pengguna dapat mengatur rentang pemicu pencocokan, output pemicu dapat terhubung ke kamera atau sensor laser.
16Fungsi kontrol sumber cahaya stroboflash operasional dan fungsi pemicu pencocokan posisi CCD.
17Perangkat lunak debugging yang kuat termasuk, operasi yang mudah, mudah bagi pengguna untuk memutar mesin.
Parameter
| Artikel |
Min.
|
Tipikal
|
Max. Apa yang terjadi?
|
Satuan
|
| Waktu operasi API |
0.425
|
0.43
|
0.45
|
ms
|
| Tegangan daya masukan |
22.5
|
24
|
26
|
VDC
|
| 12V output tegangan daya bantu |
11.76
|
12.05
|
12.24
|
VDC
|
| 12V daya bantu arus keluar |
0
|
2.0
|
2.5
|
A
|
| Kekuatan output tegangan 5V |
5.1
|
5.2
|
5.25
|
VDC
|
| 5V output arus daya |
0
|
1.8
|
2.0
|
A
|
| X/Y/Z Motor interface 24V kapasitas muatan |
0
|
3.0
|
4.0
|
A
|
| Frekuensi pulsa arah |
-
|
-
|
6.5
|
MHz
|
| Resolusi frekuensi |
0.006
|
-
|
-
|
Hz
|
| Jangkauan penghitungan skala linier |
- 2147483648
|
-
|
2147483647
|
CNT
|
| Jangkauan penghitungan pulsa arah |
- 2147483648
|
-
|
2147483647
|
CNT
|
| Tingkat penyesuaian kecepatan |
-
|
-
|
1,000,000,000
|
DDS 32 bit
|
| Resolusi skala linier didukung |
- 0.01
|
-
|
10000
|
Um..
|
| Frekuensi output sinyal skala linier |
-
|
-
|
6.5
|
MHz
|
| Input/output umum pengontrol |
-
|
-
|
-
|
Terminal
|
| Antarmuka komunikasi RS232 berkecepatan tinggi |
-
|
2
|
-
|
Terminal
|
| Input / output eksternal (Menggunakan satu antarmuka komunikasi RS232) |
-
|
24/24
|
-
|
Terminal
|
| Kekuatan output arus step drive |
0.07
|
-
|
1.15
|
A ((RMS)
|
| Subdivisi penggerak langkah |
16
|
16
|
16
|
|
Spesifikasi
| Tidak, tidak. |
Spesifikasi
|
UWC3500
|
| 1 |
Pasokan daya
|
DC24V@2A input,output DC12V@2A ((sumber daya CCD)
|
| 2 |
Pengukuran kompatibilitas perangkat lunak
|
Kompatibel penuh dengan V1.4
|
| 3 |
Dimensi
|
255 * 118 * 53 mm)
|
| 4 |
Komunikasi
|
USB atau Ethernet terisolasi (opsional)
|
| 5 |
kebijakan kontrol loop tertutup
|
PID+VFF+ dead band
|
| 6 |
Frekuensi pembaruan servo
|
2.5KHz
|
| 7 |
Anti-mechanical shock, kecepatan dioptimalkan
|
Modus SMART
|
|
| 8 |
Sumbu penghitungan transduser linier
|
3
|
|
| 9 |
sumbu pengendalian dasar
|
4
|
|
| 10 |
Biaya poros
|
Mampu menambahkan 3 sumbu pulsa + arah
|
|
| 11 |
Mode pengendalian sumbu XYZ
|
Pulsa + arah RS422
|
|
| 12 |
Jenis motor yang didukung sumbu XYZ (dengan driver motor eksternal)
|
Step/AC servo/linear servo/DC servo dengan umpan balik encoder
|
|
| 13 |
Mode kontrol sumbu U A
|
RS232 terhubung ke lensa zoom otomatis Pomeas
|
|
| 14 |
Mode kontrol sumbu U B
|
2 fase step driver tertanam, yang mendukung lensa zoom otomatis dengan motor langkah, batas tunggal / duo didukung.
|
|
| 15 |
Perencanaan kurva kecepatan
|
Jenis tangga/S
|
|
| 16 |
Interpolasi
|
Interpolasi linier multi sumbu, interpolasi busur 2 sumbu, interpolasi 3 sumbu
|
| 17 |
Frekuensi denyut nadi
|
5MHz
|
|
| 18 |
Resolusi frekuensi pulsa
|
0.001Hz
|
|
| 19 |
Tingkat penyesuaian kecepatan
|
1,000,000,000
|
|
| 20 |
Kontrol tegangan analog
|
-
|
|
| 21 |
Frekuensi penghitungan transduser linier
|
6MHz/ ((Fase A atau B)
|
|
| 22 |
Definisi sinyal transduser linier
|
R atau S untuk opsional (R:12345, S:26789)
|
|
| 23 |
Perangkat keras pengukuran probe
|
Sirkuit antarmuka probe sentuh
|
|
| 24 |
Sirkuit pengolahan kesalahan probe
|
Tersedia, perbaikan otomatis dari probe nonhoming
|
|
| 25 |
Sonde yang kompatibel
|
Renishaw/Tesa semua seri pemicu sensor sentuh
|
|
| 26 |
Modul pengolahan probe
|
Probe kecepatan tinggi kunci, joystick kontrol titik sentuh auto pause dan mundur otomatis, mode titik deteksi otomatis
|
|
| 27 |
Kartu pengumpul sinyal joystick tertanam
|
Resolusi 12 bit, input tegangan analog 0-5V, 3 tombol tekan dan 3 LED, saklar darurat berhenti termasuk, tombol penyesuaian kecepatan termasuk (digunakan secara eksklusif dengan tombol 3 #)
|
|
| 28 |
Kartu kontrol pencahayaan tertanam
|
Lampu permukaan 8 bagian + lampu bawah + lampu koaksial, pengaturan perangkat lunak tingkat 0-200
|
|
| 29 |
Fungsi pengaturan tingkat pencahayaan
|
Pengaturan perangkat keras tingkat 16 pada dasar pengaturan parameter pada persyaratan kecerahan
|
|
| 30 |
kemampuan kontrol cahaya kontur / kontrol bank LED
|
Max. 420mA, cocok untuk sebagian besar mesin perjalanan besar
|
|
| 31 |
Antarmuka pencahayaan tipe eksternal yang rumit
|
Mampu terhubung ke 5 cincin 8 bagian warna tunggal lampu yang dapat diprogram, atau 5 cincin 8 bagian 4 warna lampu yang dapat diprogram, terang tinggi / berputar
|
|
| 32 |
Antarmuka I/O umum
|
8 bagian input terisolasi, 5 output (ULN2803 kompatibel)
|
|
| 33 |
Jam sistem
|
Tahun-bulan-hari-jam-menit-detik, tidak dapat dimodifikasi
|
|
| 34 |
Peningkatan firmware
|
Customer upgrade di tempat, menawarkan solusi cepat dan pembaruan teknis.
|
|
| 35 |
Konektor probe
|
Konektor 9 pin D-DUB, lebih mudah untuk kabel dan lebih stabil
|
|
| 36 |
Konektor joystick
|
OTP6, OTP7, HC3 ((Joystick multi-key)
|
|
| 37 |
Pengolahan data joystick
|
Pengendali secara internal memproses data joystick dan kontrol gerak, saling dengan mode kontrol gerak lainnya, probe joystick menyentuh dengan auto stop dan mundur otomatis
|
|
| 38 |
Hentian darurat eksternal
|
Tombol hentian darurat mengontrol pasokan listrik motor
|
|
| 39 |
Perencanaan kurva kecepatan
|
Jenis tangga / S
|
|
| 40 |
Saklar batas perangkat lunak
|
Tersedia
|
|
| 41 |
Titik perlambatan perangkat lunak
|
Tersedia
|
|
| 42 |
Jarak pengereman yang ditentukan
|
Tersedia
|
|
| 43 |
Perangkat lunak debugging yang didukung
|
Versi V4.0 atau lebih baru (deteksi otomatis dan pengaturan parameter)
|
|

 Pesan Anda harus antara 20-3.000 karakter!
Pesan Anda harus antara 20-3.000 karakter!